The concept for autonomous ship guidance is being worked out in detail within the work package “Fine-tuning of concept and algorithms”. Furthermore, the transfer variables to the areas of sensor technology and actuator technology are coordinated.
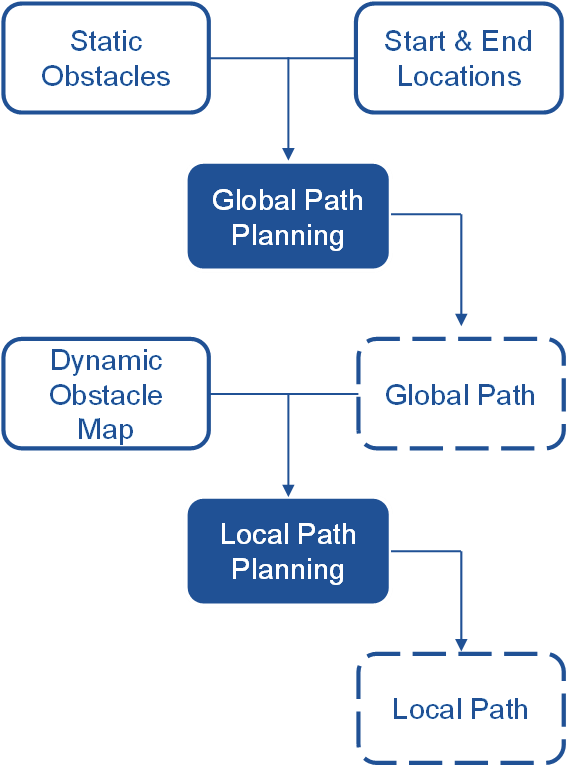
The initial route of the barge from a starting point to a destination is determined within the concept by global path planning. The global path planning is based on all known static objects, which are extracted from the available map material.
During the journey, a so-called obstacle map is created on the basis of the environment recorded by the sensors. In addition to the static objects, this also includes dynamic objects such as other barges. The obstacle map is created and continuously updated in a defined area around the inland vessel.
On the basis of this obstacle map, local path planning is then performed. The route created by the global path planning is used as a starting point for the local path planning. Depending on obstacles detected within the obstacle map, the route is continuously adjusted by local path planning.