Innerhalb des Arbeitspaktes „Feinkonzeptionierung und Abstimmung der Algorithmen“ wird das Konzept zur autonomen Schiffsführung detailliert ausgearbeitet. Ferner werden die Übergabegrößen zu den Bereichen der Sensorik sowie der Aktorik abgestimmt.
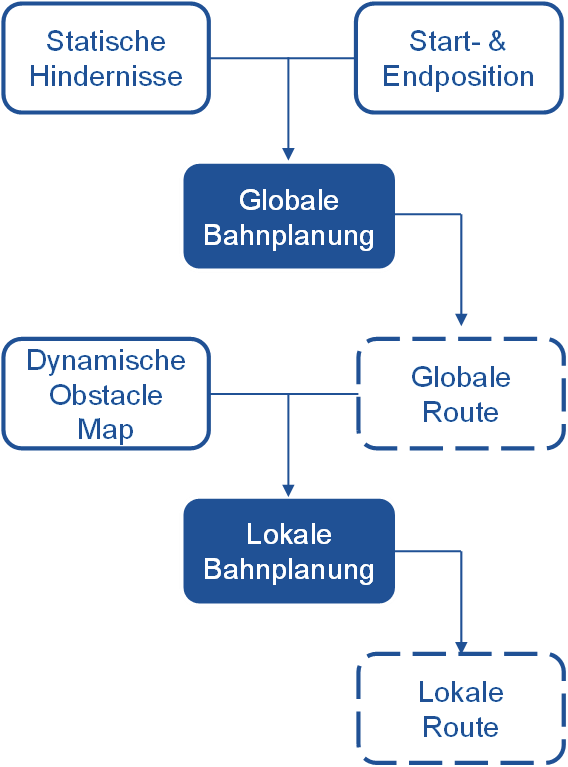
Die initiale Route des Binnenschiffs von einem Start- zu einem Zielpunkt wird innerhalb des Konzeptes durch eine globale Bahnplanung bestimmt. Die globale Bahnplanung erfolgt dabei auf Basis von allen bekannten statischen Objekten, welche aus dem vorhandenen Kartenmaterial gewonnen werden.
Während der Fahrt wird auf Basis der durch die Sensorik erfasste Umgebung eine sogenannte Obstacle-Map erstellt. Diese bezieht neben den statischen Objekten ebenfalls dynamische Objekte wie z.B. andere Binnenschiffe ein. Dabei wird die Obstacle-Map in einem definierten Bereich um das Binnenschiff erstellt und kontinuierlich aktualisiert.
Auf Basis dieser Obstacle-Map erfolgt anschließend eine lokale Bahnplanung. Als Ausgangspunkt für die lokale Bahnplanung wird die durch die globale Bahnplanung erstellte Route verwendet. In Abhängigkeit von erkannten Hindernissen innerhalb der Obstacle-Map wird die Route durch die lokale Bahnplanung laufend angepasst.