Umsetzung der automatisierten Schiffsführung
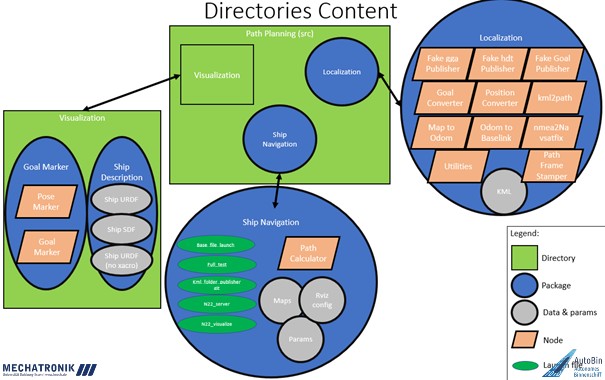
Innerhalb dieses Arbeitspaketes werden die abgestimmten Algorithmen aus Arbeitspaket 3.1 (Feinkonzeption und Abstimmung der Algorithmen) auf dem Schiff implementiert. Hierfür wird eine ROS2-Infrastruktur aufgebaut. ROS2 steht für Robot Operating System 2 und beinhaltet ein Framework für den einfachen Austausch von Daten zwischen mehreren verteilten Systemen. Die Verbauten Sensoren auf dem Schiff stellen ihre Daten dabei in Form von ROS2-Topics innerhalb der Infrastruktur bereit. Knoten des ROS2-Netzwerkes, die eine Implementierung von verschiedenen Algorithmen beinhalten, können anschließend die Daten empfangen und weiterverarbeiten. Im gleichen Prinzip erfolgt die Bereitstellung der Steuerdaten, welche durch die Algorithmen berechnet werden und anschließend den Aktoren des Schiffes zugänglich gemacht werden.
Neben der einfachen Kommunikation bringt das ROS2-System jedoch noch weitere Vorteile mit sich. Eine Aufzeichnungsmöglichkeit aller Sensor- und auch Steuerdaten ist innerhalb dieses Systems bereits nativ vorhanden. Viele Algorithmen für die Navigation von Robotern, die bereits zum Stand der Technik zählen, sind darüber hinaus bereits in das ROS2-Framework integriert. Diese können ebenfalls für die Navigation des autonomen Binnenschiffes verwendet werden. Über das Paket NAV2 können beispielsweise der A-Star sowie der Time Elastic Bands Algorithmus direkt mit den bereitgestellten Sensordaten ausgeführt werden.
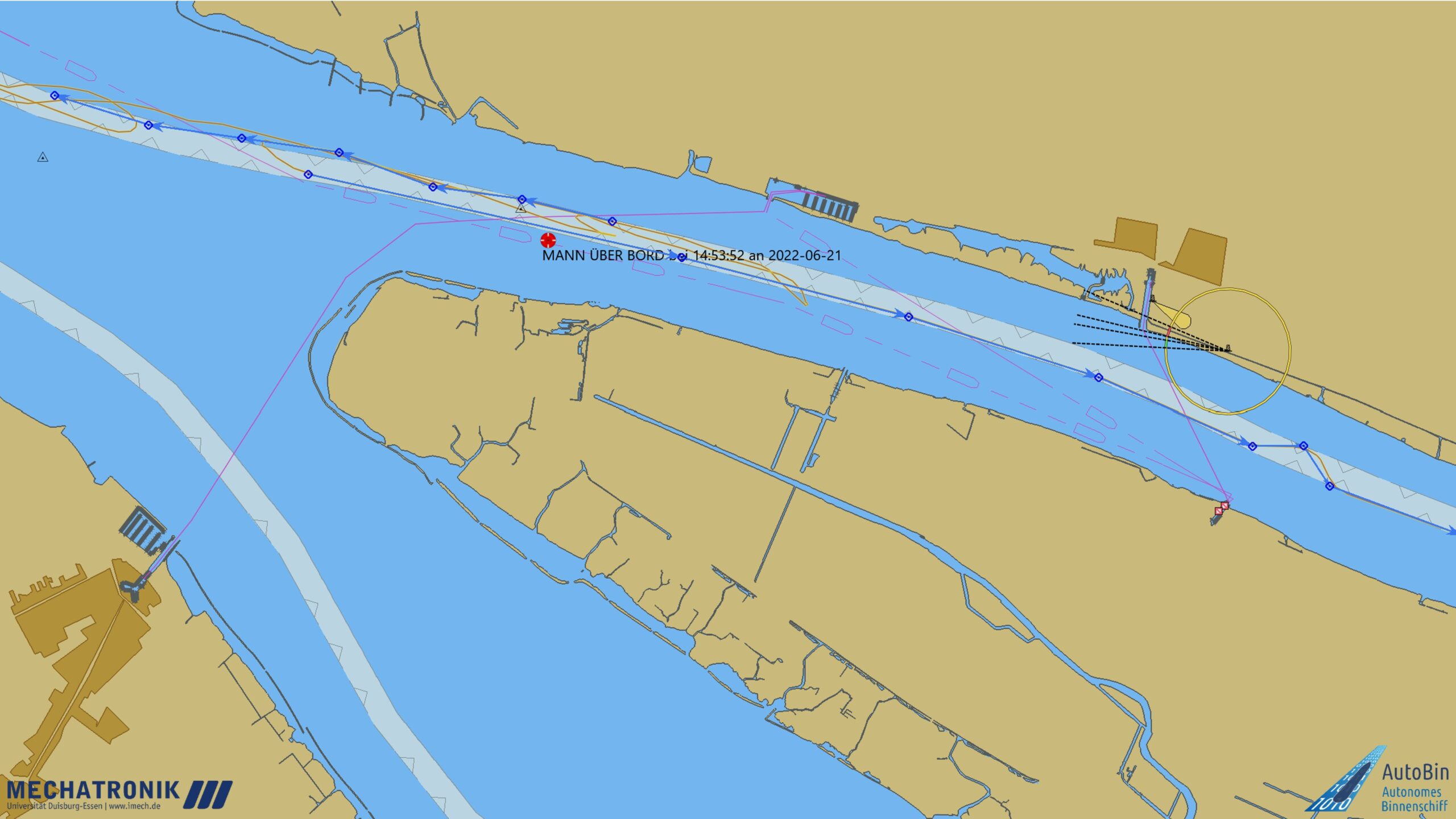
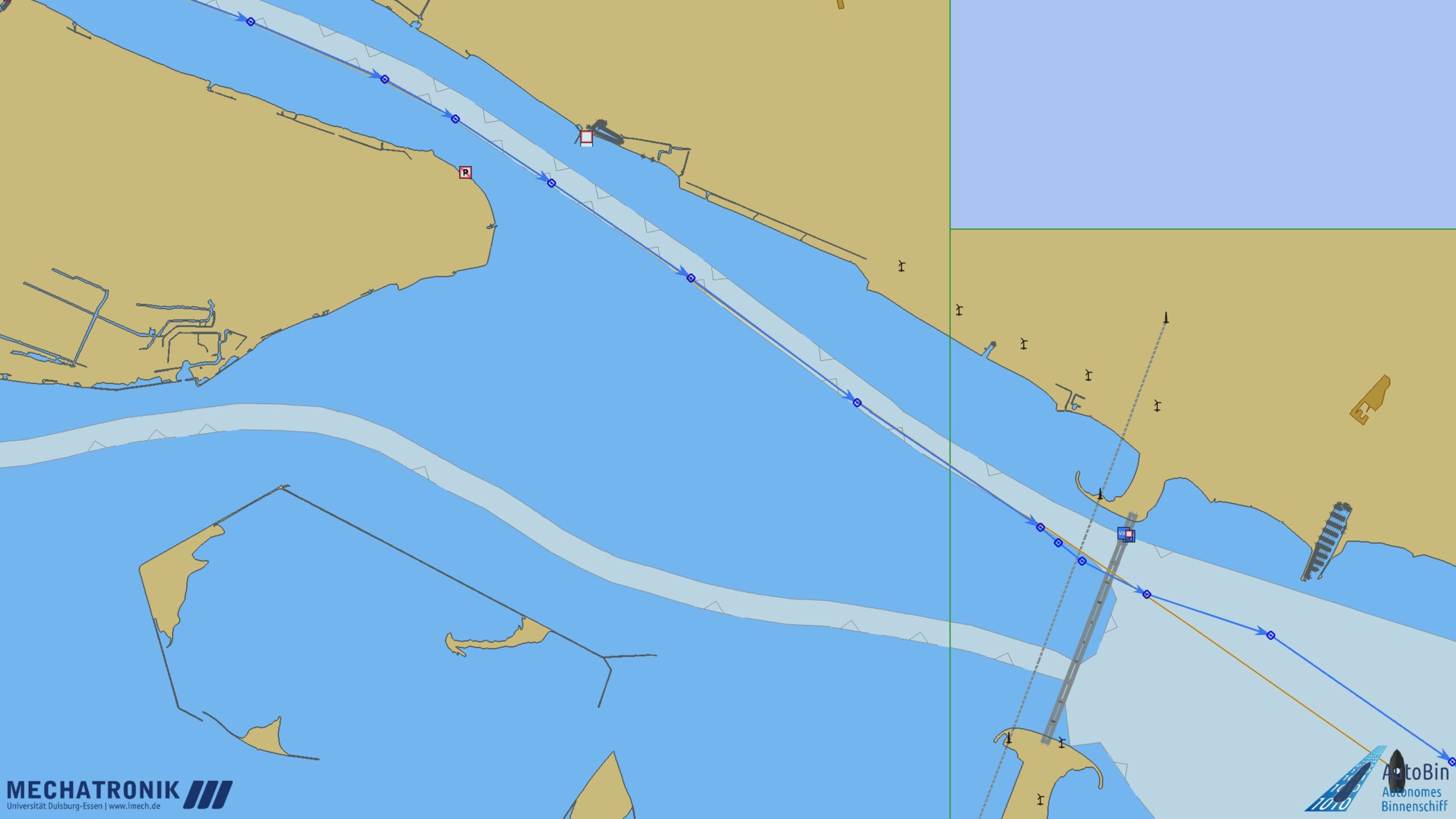
Wie bereits in AP 3.1 dargestellt, teilt sich die Navigation in globale sowie lokale Bahnplanung. Beide werden anhand von sogenannten Obstacle-Maps durchgeführt und beziehen einmal statische (globale Bahnplanung) sowie dynamische Hindernisse (lokale Bahnplanung) mit in ihre Berechnungen ein.
Für erste Versuche innerhalb der Testfahrten wird hier zunächst auf virtuelle Hindernisse zurückgegriffen. Durch simulierte (Lidar-) Punktwolken können Begegnungen mit andere Verkehrsteilnehmer sowie das Durchfahren enger Gewässerabschnitte zunächst mit einem deutlich verringerten Risiko getestet werden.
Sobald ein Pfad durch die Bahnplanung berechnet wurde, muss das Schiff diesem mit Hilfe eines Reglers folgen. Hierfür werden verschiedene Regelungskonzepte erprobt und zur Abbildung des Testschiffes parametrisiert. Neben einem PID-Regler wird ebenfalls ein Sliding Window – Regler implementiert und getestet.