3.3 Integration der autom. Schiffsführung in der Simulationsumgebung
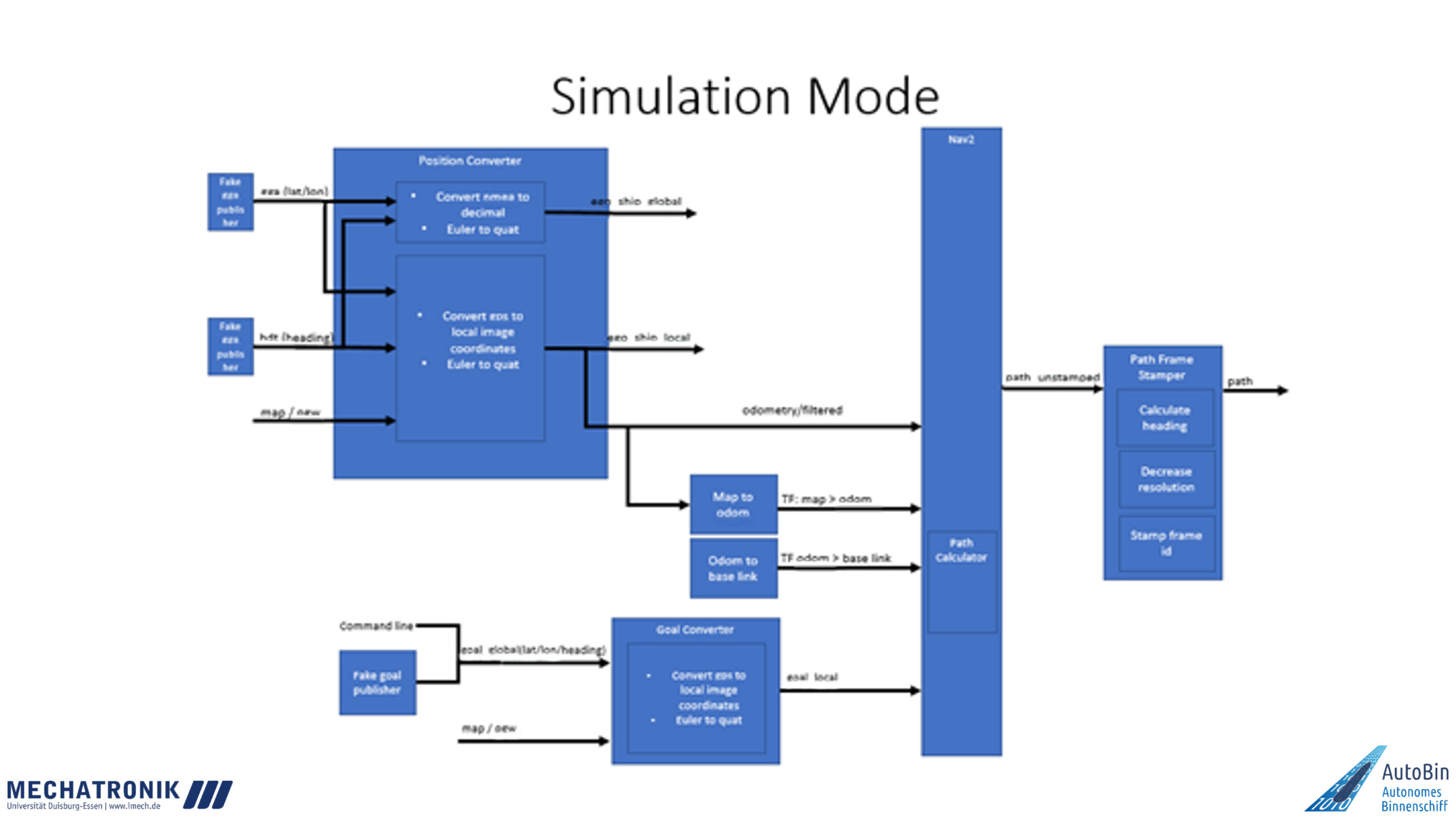
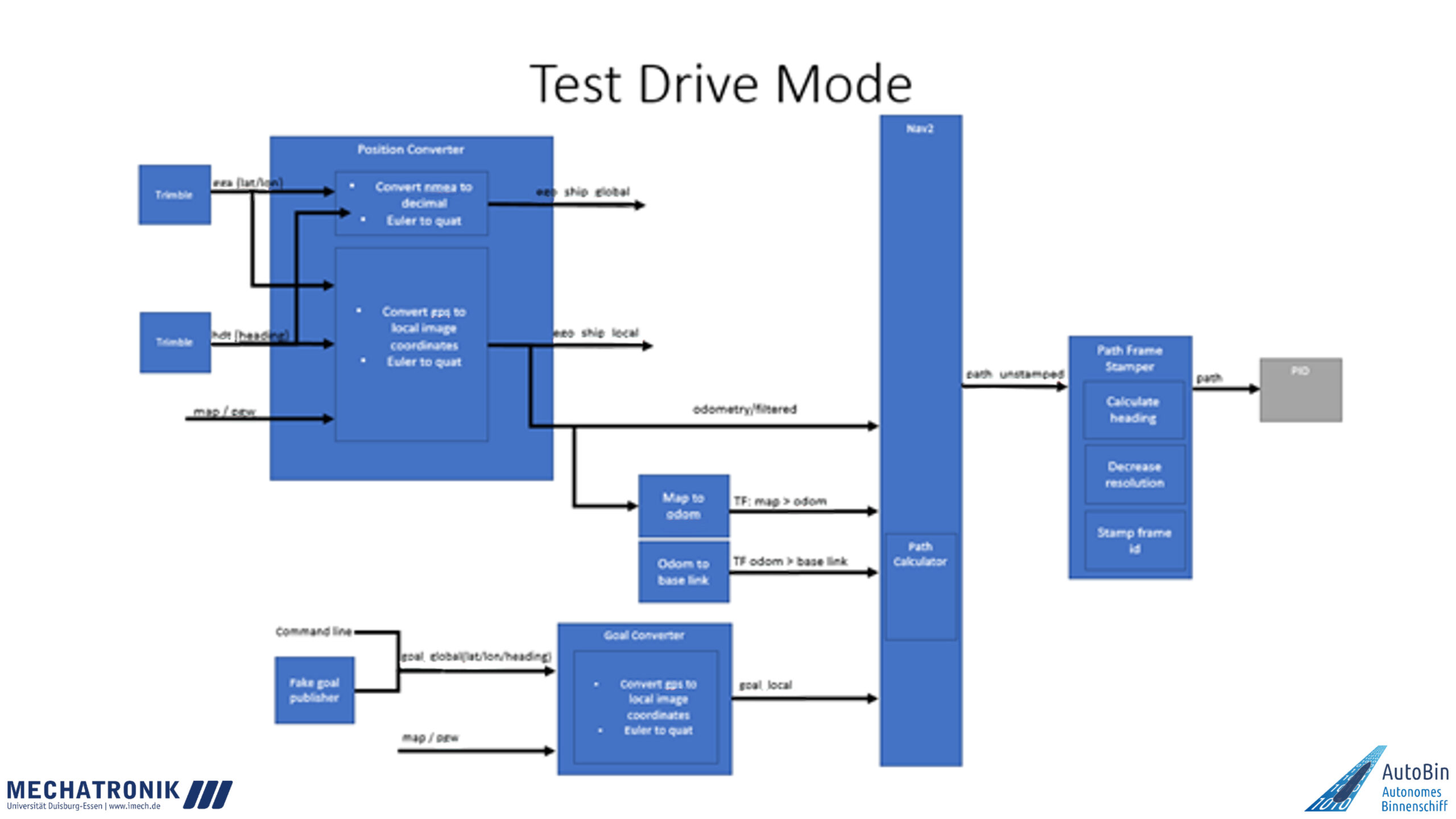
Innerhalb dieses Arbeitspaketes werden die Algorithmen der automatisierten Schiffsführung in die Simulationsumgebung integriert. Hierfür sind besonders die einheitlichen Schnittstellen zwischen den Automatisierungsalgorithmen, den Sensoren auf dem Testschiff sowie den virtuellen Sensoren innerhalb der Simulationsumgebung von Bedeutung. Neben den gleichen Datenformaten der Sensoren innerhalb der Simulation, müssen ebenfalls die nativen Steuersignale der automatisierten Schiffsführung verarbeitet werden können.
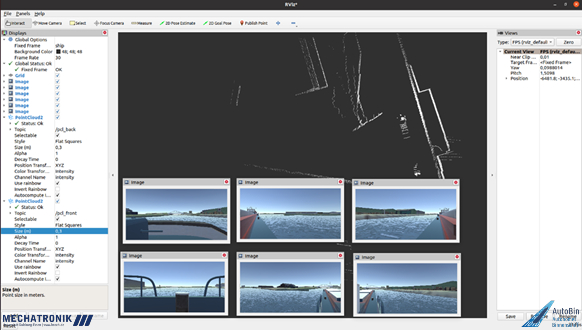
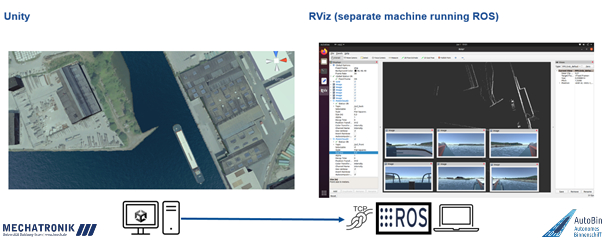
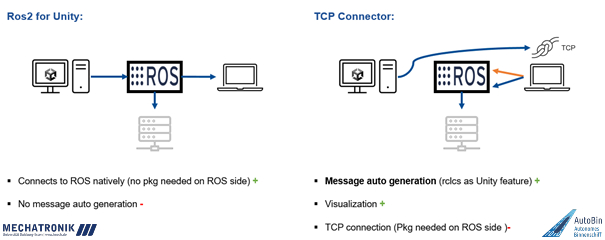
Für die oben genannte Implementierung der gleichen Datenformate, muss die Simulationsumgebung um die entsprechenden Schnittstellen zum ROS2 System erweitert werden. Über diese werden auf dem Testschiff sämtliche Daten – Sensorsignale sowie Steuerdaten – übertragen. Durch bereits vorhandenen Bibliotheken für die Game-Engine Unity kann eine Verbindung zum ROS2 System aufgebaut werden. Somit können die virtuell generierten Daten direkt in die Steuerungsalgorithmen eingespeist werden.
Über die Nachbildung des realen Testfeldes kann das System hierdurch virtuell getestet werden, ohne einen Zusammenstoß mit Kanalwänden zu riskieren.
Arbeitspakete
1. Simulationsumgebung
Die Simulationsumgebung als virtuelles Abbild der realen Welt ist die zentrale Entwicklungsumgebung für alle Steuerungs- und Überwachungsalgorithmen. Ein digitaler Zwilling des Testschiffs ist in der Simulationsumgebung implementiert.
Die Entwicklung der automatisierten Steuerung des Binnenschiffs erfolgt zunächst in einem Simulator. Im ersten Arbeitspaket wird deshalb der vorhandene Simulator so erweitert, dass Sensormesswerte virtuell erzeugt werden können. Die parallel dazu modular entwickelte Künstliche Intelligenz (KI) für die Schiffsführung bzw. zur Umsetzung der Fahrverhaltensfunktionen wird dann in einem Simulationsmodell so integriert, dass eine spätere parallele Portierung auf ein reales Binnenschiff ermöglicht wird. Weiterhin wird das Verhalten der weiteren Verkehrsteilnehmer (Schiffe im Umfeld des automatisierten Binnenschiffs) modelliert und in die Simulationsumgebung integriert. Die Entwicklung der KI zur Umsetzung der Fahrverhaltensfunktionen für unterschiedliche Aufgaben erfolgt zunächst parallel, um dann im Simulator erprobt zu werden. Grundlegende Fragestellungen zur Wahl und zum Aufbau des Moduls werden auf diese Weise effizient bearbeitet.
Die Realisierung der Automatisierung des Testschiffes bedarf einer Feinkonzeption und Abstimmung der Algorithmen. Weiterhin müssen im Vorfeld die Automatisierungsfunktionen in der Simulationsumgebung getestet werden. Anschließend erfolgt eine Validierung am Realsystem.
3.1 Feinkonzeption und Abstimmung der Algorithmen
Feinkonzeption und Abstimmung der Algorithmen zur Automatisierung des Binnenschiffs
Zur Erprobung des Testschiffes werden zunächst Testszenarien definiert. Anschließend wird die automatisierte Schiffsführung integriert und iterativ angepasst. Dazu sind Testfahrten zwingend notwendig.
Die Automatisierung von Binnenschiffen muss auch wirtschaftlich betrachtet werden. Diese Betrachtung findet innerhalb einer Wirtschaftlichkeitsanalyse statt, welche auch bewertet werden muss.