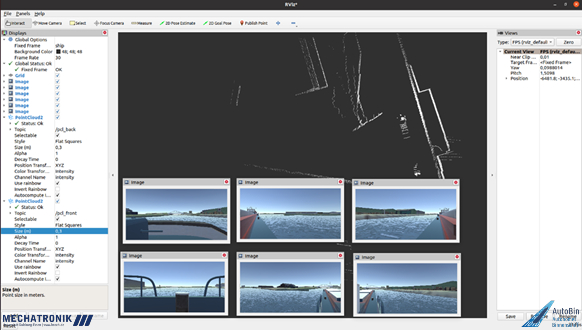
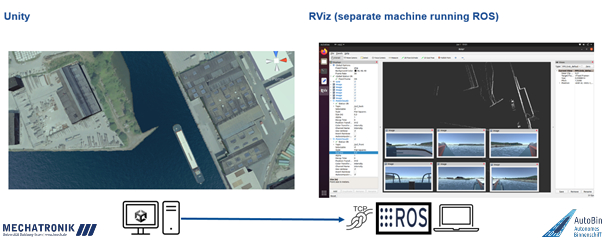
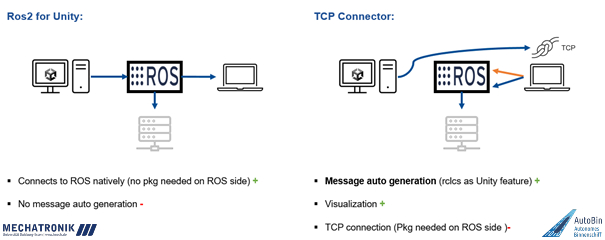
For the above mentioned implementation of the same data formats, the simulation environment must be extended by the corresponding interfaces to the ROS2 system. All data – sensor signals as well as control data – are transmitted via these interfaces on the test ship. By already existing libraries for the game engine Unity a connection to the ROS2 system can be established. Thus, the virtually generated data can be directly fed into the control algorithms.
By replicating the real test field, the system can thus be tested virtually without risking a collision with channel walls.