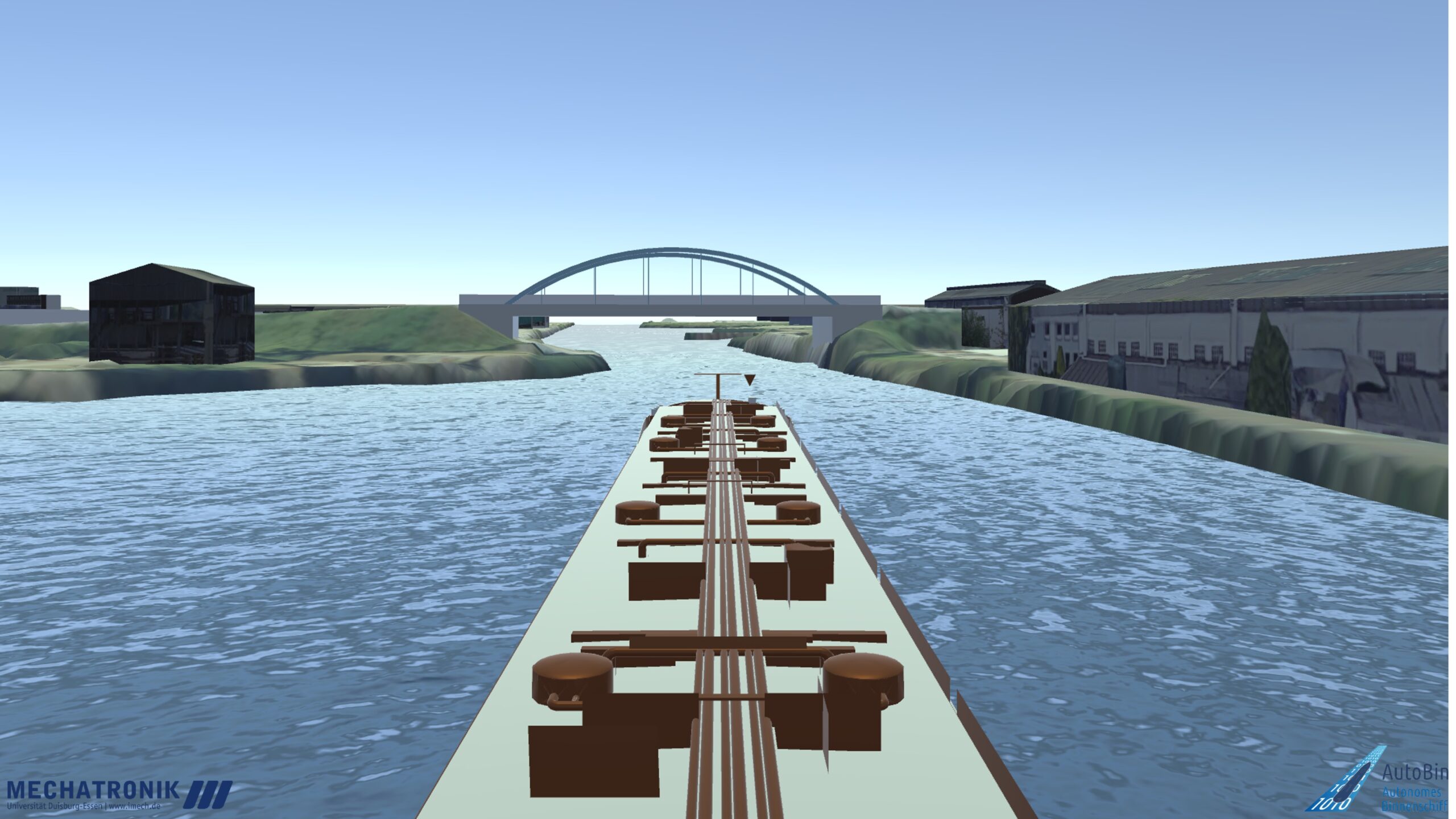
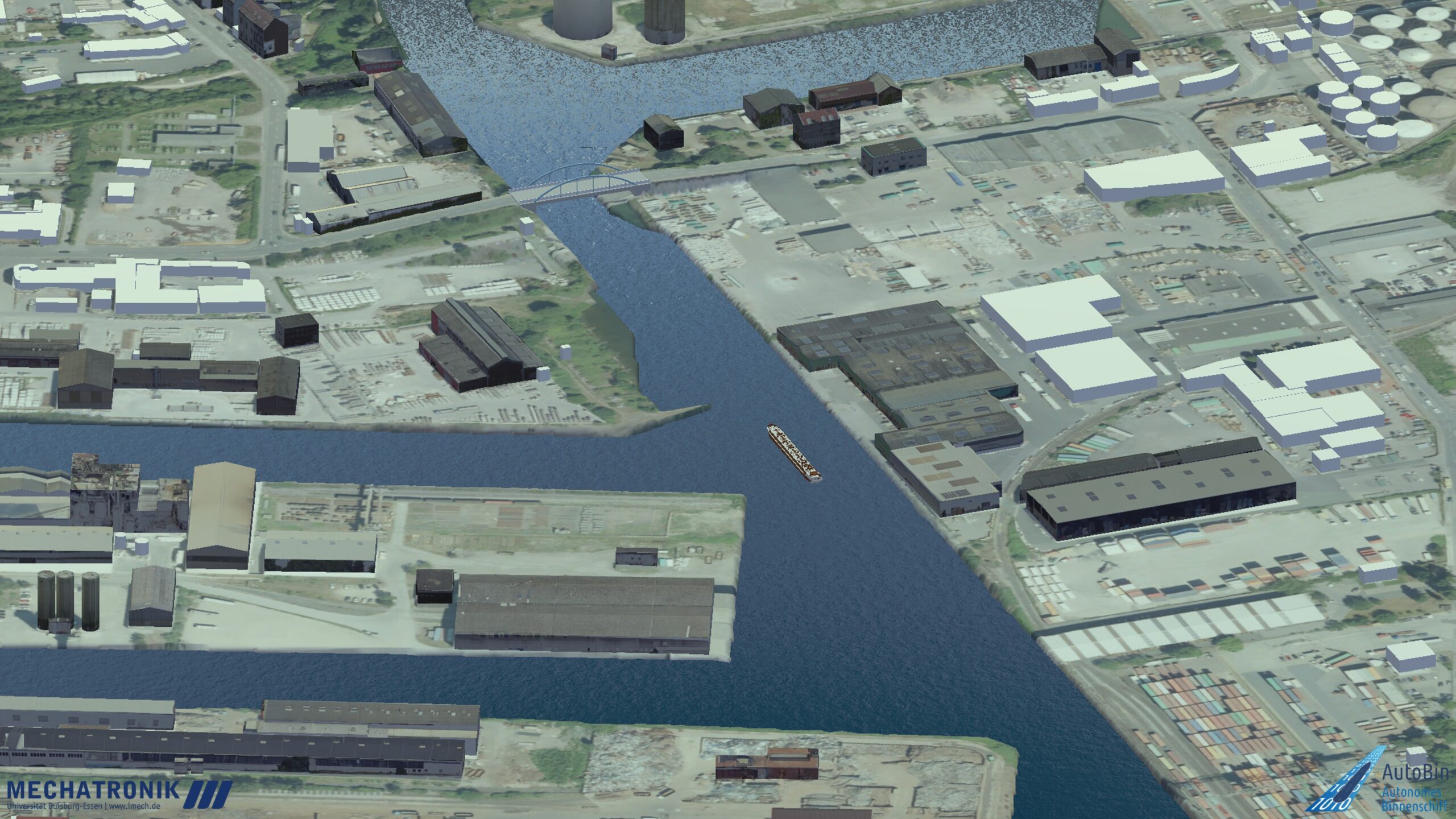
Within this work package, a virtual image of the test field for of the test field for the automated test drives. This includes the part of the Dortmund-Ems Canal from the port in Dortmund to the lock in Waltrop. Waltrop. In addition to the pure representation of the environment, the Unity3D based visualization environment is extended by the output of virtual sensor data for the further processing in WP 1.2.
In close cooperation with WP 2, sensor models will be generated, which will represent the measured values data structure, measuring frequency and accuracies as it is done with the selected sensors in the real the selected sensors in the real test case. The pre-processing of the virtual measured values is also part of this work package. In this step, the data transfer is adapted to the requirements of the data structure and measurement frequency. data structure and measurement frequency of the driving behavior module/the AI.
Furthermore, the simulated inland vessel of the simulator will be inland vessel of the simulator is successively adapted to the real conditions of the real vessel to be to be automated. For this purpose, in particular the and sensor components are mapped in corresponding simulation models. models. This ensures that the real conditions are adequately reproduced for the for the simulative preliminary tests. This iterative process is process takes place over a large part of the year due to the step-by-step ship guidance algorithms over a large part of the project duration.
In preparation for the development of ship guidance algorithms based on real data in the ship simulator, a method will continue to be integrated that can both the output of virtual measurements and the output of stored real stored real measurements. A special challenge challenge in this context is the realistic manipulation of the real measurements. measurements, which may be necessary due to different trajectories (the simulated ship may be (the simulated ship may behave differently than the skipper did in a comparable situation). situation, which makes measurements at other positions necessary). positions become necessary).
Within the scope of this work package, several iteration loops are foreseen, which, due to new measured values, changing environmental conditions, extensions of the experimental vessel, etc. In order to achieve a realistic conditions, this work package therefore contains a preparatory part as well as a a parallel strand for the iteration loops and the necessary extensions. iteration loops and necessary extensions.
In order to generate the virtual sensor data in real time or even faster faster, a correspondingly powerful hardware is required in the background. background is necessary. For this purpose, the simulation infrastructure of the “Versuchs- und Center for Autonomous Inland Navigation” (www.velabi.de) can be can be used. The resulting simulation environment, as well as the interaction with the virtual with the virtual test ship can be tested there in a 360° 3D round projection. can be tested.