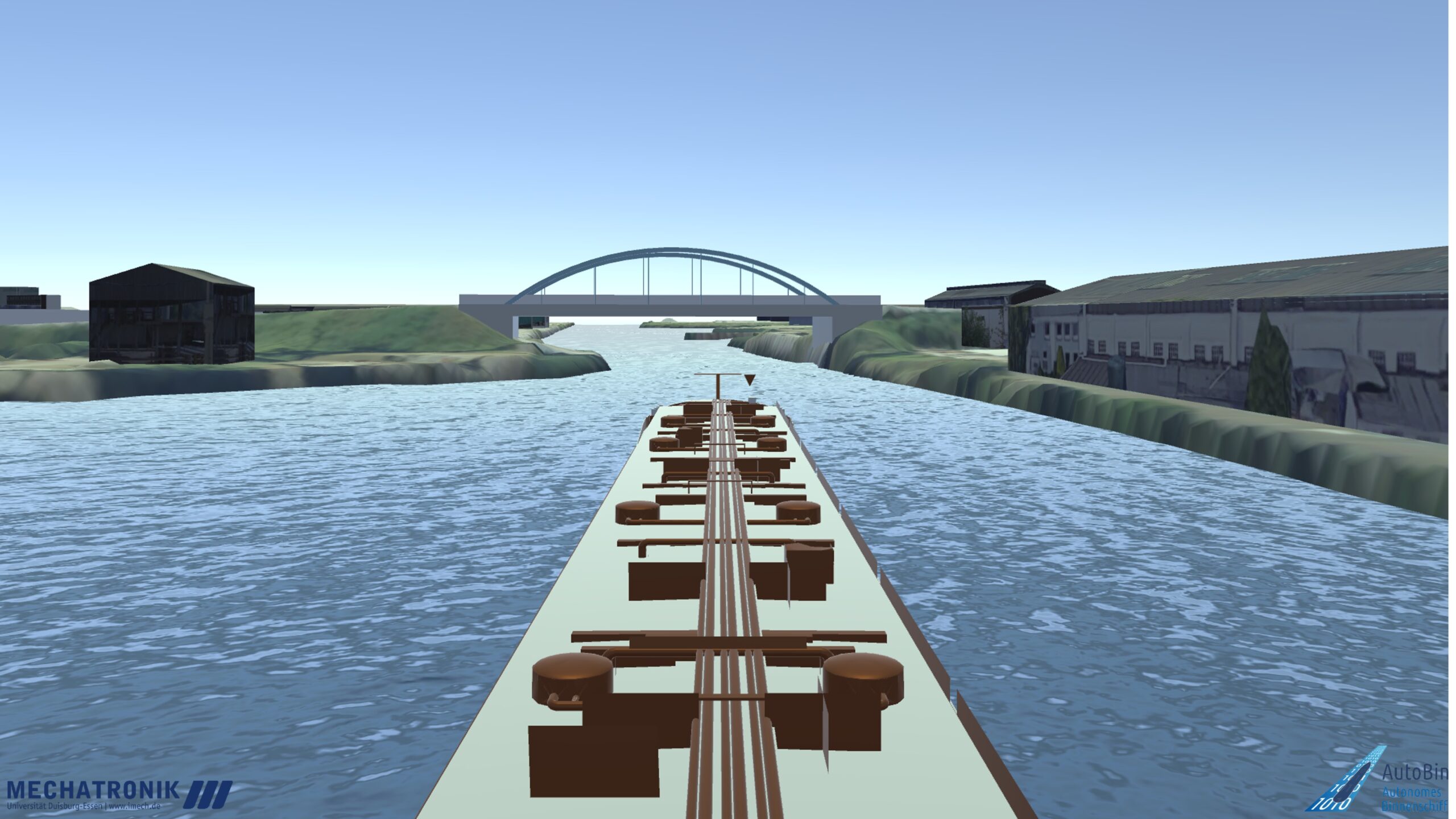
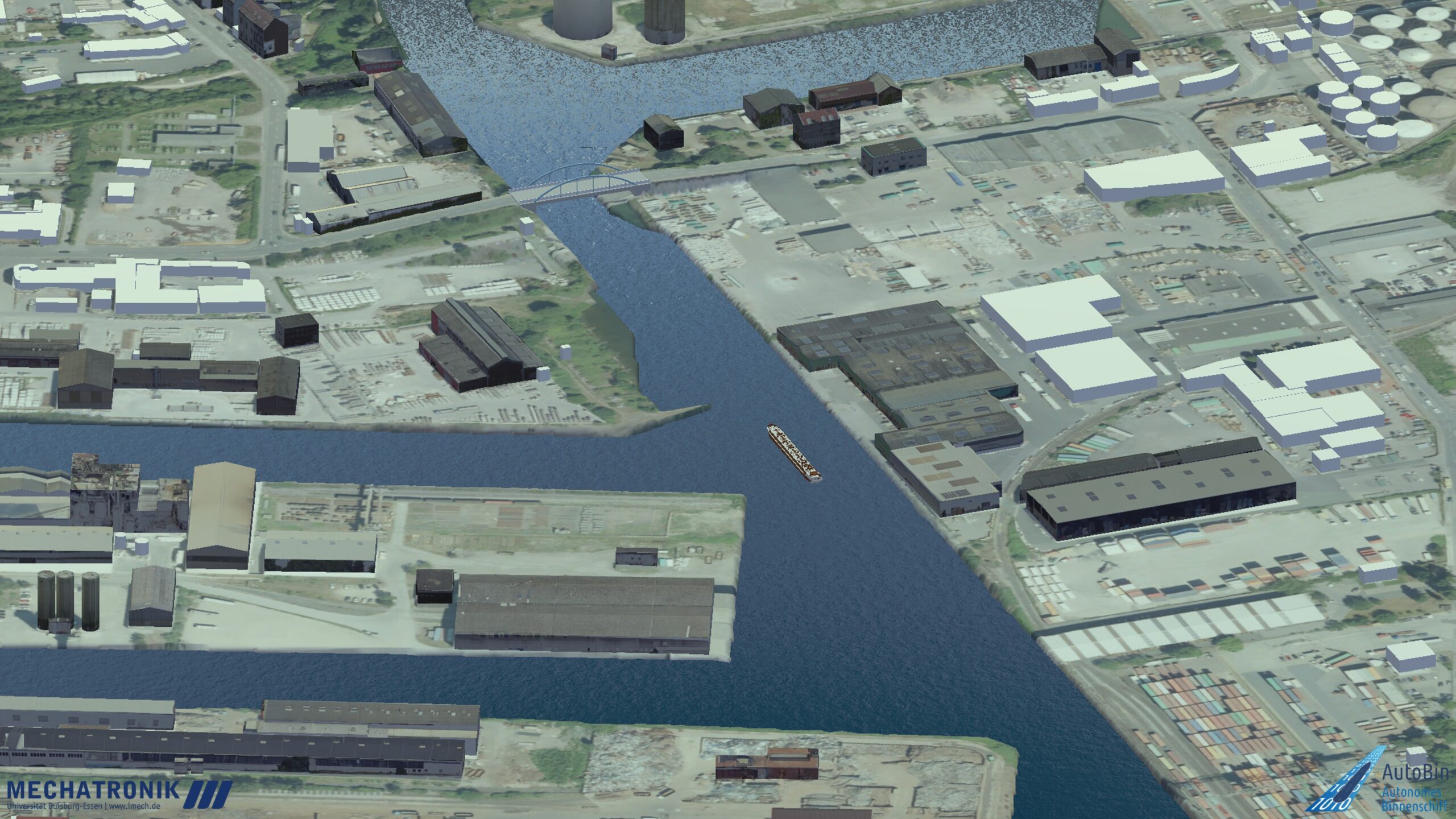
Innerhalb dieses Arbeitspaketes wird ein virtuelles Abbild
des Testfeldes für die automatisierten Testfahrten erstellt. Dieses beinhaltet
den Teil des Dortmund-Ems-Kanals vom Hafen in Dortmund bis hin zur Schleuse in
Waltrop. Neben der reinen Darstellung der Umgebung wird die auf Unity3D
basierte Visualisierungsumgebung um die Ausgabe von virtuellen Sensordaten für
die Weiterverarbeitung im AP 1.2 erweitert.
In enger Verzahnung mit AP 2 werden Sensormodelle erzeugt, welche die Messwerte
bzgl. Datenstruktur, Messfrequenz und Genauigkeiten so ausgibt, wie es auch mit
den ausgewählten Sensoren im realen Testfall zu erwarten ist. Die
Vorverarbeitung der virtuellen Messwerte ist ebenfalls Bestandteil dieses
Arbeitspakets. In diesem Arbeitsschritt wird der Datentransfer an die Anforderungen
bzgl. Datenstruktur und Messfrequenz des Fahrverhaltensmoduls/der KI angepasst.
Weiterhin wird in diesem Arbeitspaket das simulierte
Binnenschiff des Simulators sukzessive den realen Gegebenheiten des realen, zu
automatisierenden Schiffs angepasst. Zu diesem Zweck werden insbesondere die
Aktorik- und Sensorikkomponenten in entsprechenden Simulationsmodellen
abgebildet. Dadurch wird eine adäquate Wiedergabe der realen Gegebenheiten für
die simulativen Voruntersuchungen gewährleistet. Dieser iterative Prozess zieht
sich aufgrund der schrittweisen Ausstattung und Integration der
Schiffsführungsalgorithmen über einen Großteil der Projektlaufzeit hin.
In Vorbereitung der Entwicklung von Algorithmen zur Schiffsführung anhand von
Realdaten im Schiffssimulator wird weiterhin eine Methode integriert, die
sowohl die Ausgabe von virtuellen Messungen als auch die Ausgabe von
gespeicherten realen Messungen ermöglicht. Eine besondere Herausforderung
stellt in diesem Zusammenhang die realitätsnahe Manipulation der realen
Messungen dar, welche aufgrund ggf. unterschiedlicher Trajektorien notwendig
wird (das simulierte Schiff kann sich anders verhalten, als der Schiffsführer
dies in einer vergleichbaren Situation getan hat, wodurch Messungen an anderen
Positionen nötig werden).
Im Rahmen dieses Arbeitspakets sind mehrere Iterationsschleifen vorgesehen,
welche aufgrund von neuen Messwerten, veränderlichen Umgebungsbedingungen,
Erweiterungen des Versuchsschiffs etc. anfallen. Um eine realitätsnahe
Abbildung der Gegebenheiten zu erreichen, enthält dieses Arbeitspaket daher
neben einem vorbereitenden Anteil auch einen parallelen Strang für die
Iterationsschleifen und notwendigen Erweiterungen.
Um die virtuellen Sensordaten möglichst in Echtzeit oder
schneller zu generieren ist eine entsprechend leistungsfähige Hardware im
Hintergrund nötig. Hierzu kann die Simulationsinfrastruktur des „Versuchs- und
Leitungszentrum autonome Binnenschiffe“ (www.velabi.de)
verwendet werden. Die entstehende Simulationsumgebung, sowie die Interaktion
mit dem virtuellen Testschiff kann dort in einer 360°-3D-Rundprojektion
getestet werden.