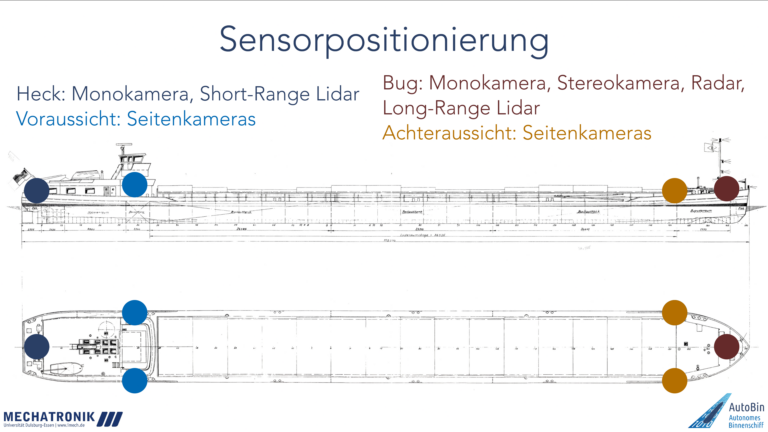
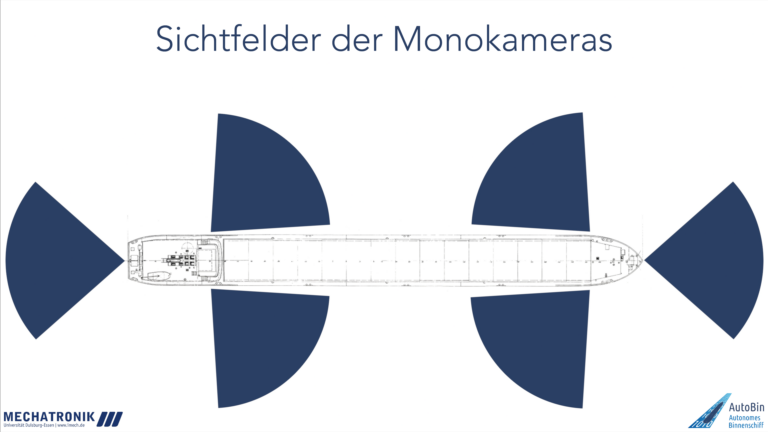
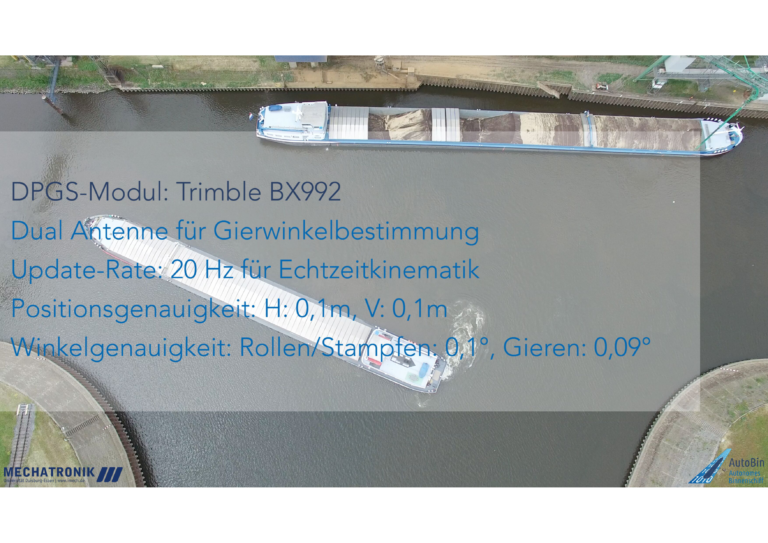
Im Arbeitspaket „Sensorik“ wird die Niedersachsen 22 der HGK-Logistic Group mit zusätzlicher Sensorik ausgestattet. Diese übernimmt während der Fahrt die Erfassung der Schiffsumgebung. Dadurch lassen sich Hindernisse und Gefahren identifizieren. Das Sensorikkonzept erfüllt dabei die in AP 1.2 definierten Anforderungen. Die Fahrtrichtung wird innerhalb des Konzepts durch ein Lidar, eine Monokamera sowie eine Stereokamera erfasst. Die Erfassung des rückwärtigen Bereichs erfolgt durch ein Lidar sowie eine Monokamera. Die Seitenbereiche werden über insgesamt vier Monokameras erfasst. Position und Orientierung des Binnenschiffs werden über ein kombiniertes Sensormodul bestimmt, welches mit einem dGPS-Modul sowie Inertialsensorik ausgestattet ist. Abgerundet wird das Sensorkonzept durch das bereits vorhandene schiffsinterne Radar.
Ferner zählen zum Arbeitspaket die Inbetriebnahme und die Integration der Sensorik an Bord des Binnenschiffs. Hierzu werden einerseits Befestigungsmöglichkeiten ausgearbeitet und umgesetzt. Anderseits umfasst die Inbetriebnahme die Umsetzung einer Routine, welche es ermöglicht Sensordaten gezielt aufzunehmen, vorzuverarbeiten und in einer Datenbank zu sichern.
Die so gewonnenen Sensordaten können anschließen zum Training KI-basierter Methoden verwendet werden. Somit werden die aufgezeichneten Realdaten auf diese Weise im Simulator nutzbar gemacht.
Die GMS Niedersachsen 22 ist ein typisches Trockengutschiff mit 100 m Länge und 10,5 m Breite. Sie wird von der HGK Shipping GmbH bereedert und ist überwiegend im westdeutschen Kanalnetz zwischen Rhein und Elbe unterwegs.
Im aktuellen Video "AutoBin Niedersachsen 22" werden Sie bei einem viertuellen Rundgang mit an Bord des Testschiffs genommen.
Die Simulationsumgebung als virtuelles Abbild der realen Welt ist die zentrale Entwicklungsumgebung für alle Steuerungs- und Überwachungsalgorithmen. Ein digitaler Zwilling des Testschiffs ist in der Simulationsumgebung implementiert.
Die Entwicklung der automatisierten Steuerung des Binnenschiffs erfolgt zunächst in einem Simulator. Im ersten Arbeitspaket wird deshalb der vorhandene Simulator so erweitert, dass Sensormesswerte virtuell erzeugt werden können. Die parallel dazu modular entwickelte Künstliche Intelligenz (KI) für die Schiffsführung bzw. zur Umsetzung der Fahrverhaltensfunktionen wird dann in einem Simulationsmodell so integriert, dass eine spätere parallele Portierung auf ein reales Binnenschiff ermöglicht wird. Weiterhin wird das Verhalten der weiteren Verkehrsteilnehmer (Schiffe im Umfeld des automatisierten Binnenschiffs) modelliert und in die Simulationsumgebung integriert. Die Entwicklung der KI zur Umsetzung der Fahrverhaltensfunktionen für unterschiedliche Aufgaben erfolgt zunächst parallel, um dann im Simulator erprobt zu werden. Grundlegende Fragestellungen zur Wahl und zum Aufbau des Moduls werden auf diese Weise effizient bearbeitet.
Die Realisierung der Automatisierung des Testschiffes bedarf einer Feinkonzeption und Abstimmung der Algorithmen. Weiterhin müssen im Vorfeld die Automatisierungsfunktionen in der Simulationsumgebung getestet werden. Anschließend erfolgt eine Validierung am Realsystem.
3.1 Feinkonzeption und Abstimmung der Algorithmen
Feinkonzeption und Abstimmung der Algorithmen zur Automatisierung des Binnenschiffs
Zur Erprobung des Testschiffes werden zunächst Testszenarien definiert. Anschließend wird die automatisierte Schiffsführung integriert und iterativ angepasst. Dazu sind Testfahrten zwingend notwendig.
Die Automatisierung von Binnenschiffen muss auch wirtschaftlich betrachtet werden. Diese Betrachtung findet innerhalb einer Wirtschaftlichkeitsanalyse statt, welche auch bewertet werden muss.